_1.png)
")
")
")
")
")
")
KS0007
Nuevo
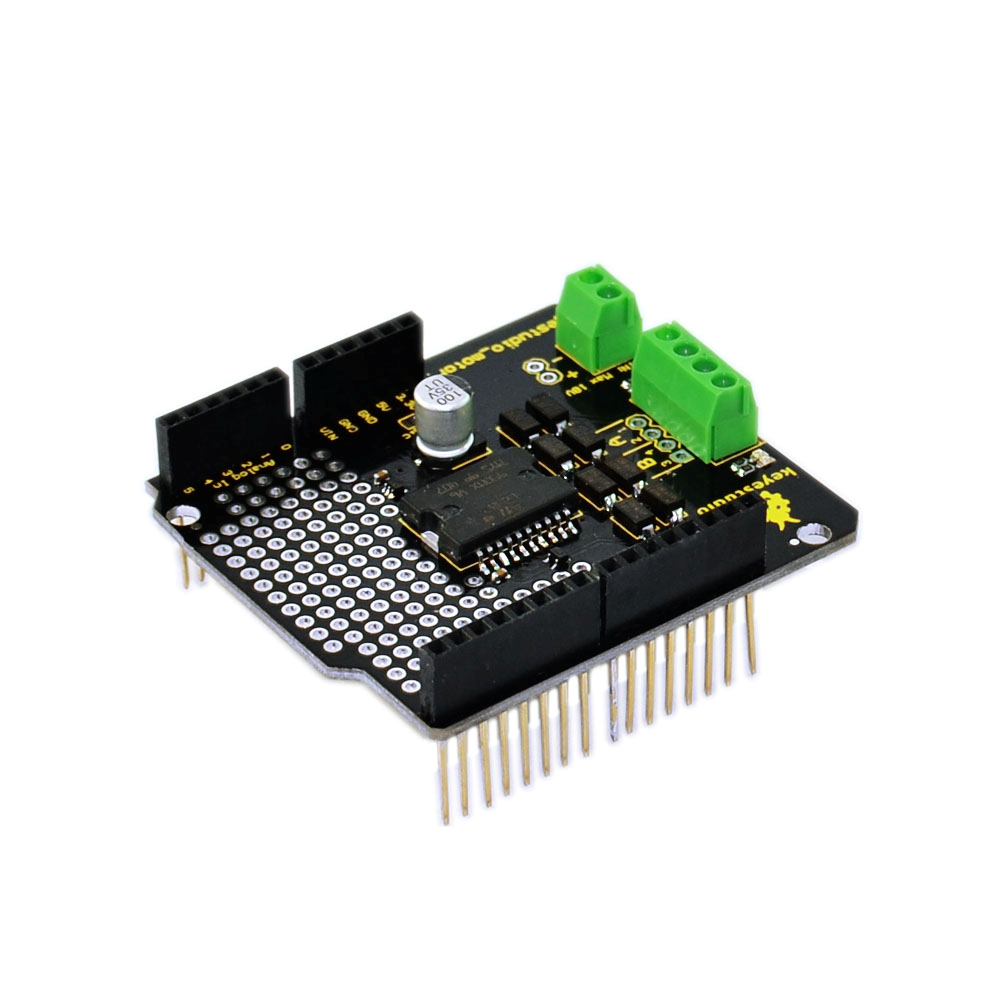
Escudo de 2 Amperios con controlador de motor DC (puente H) para ARDUINO. Marca Keyestudio.
Este escudo controlador de motor DC incorpora el Chip controlador L298P fabricado especialmente para motores de alta potencia. Puede controlar directamente 2 motores DC que alcanzan una corriente de operación de hasta 2A.
La salida del motor está equipada con ocho diodos schottky de alta velocidad como protección. Este controlador tiene un diseño del circuito limpio y componentes enlazados, además, el diseño multicapa permite que sea conectado a la tarjeta Arduino directamente.
El escudo controlador L298P de motor DC tiene el modo PWM. El motor puede alimentarse a través de la entrada Arduino VIN o la entrada del terminal del controlador, que se pueden conmutar con un puente.

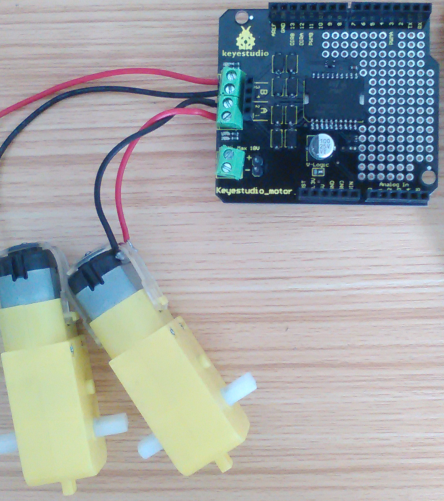
De acuerdo con la manera de conexión, podemos controlar la transferencia, la inversión, la parada de dos motores de corriente continua (M1 y M2), así como la regulación de velocidad de PWM.
int E1 = 3;
int M1 = 12;
int E2 =11;
int M2 = 13;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, 200); // PWM regulate speed
analogWrite(E2, 200); // PWM regulate speed
delay(8000);
digitalWrite(M1,LOW);
digitalWrite(M2, LOW);
analogWrite(E1, 200); //PWM regulate speed
analogWrite(E2, 200); //PWM regulate speed
delay(8000);
}
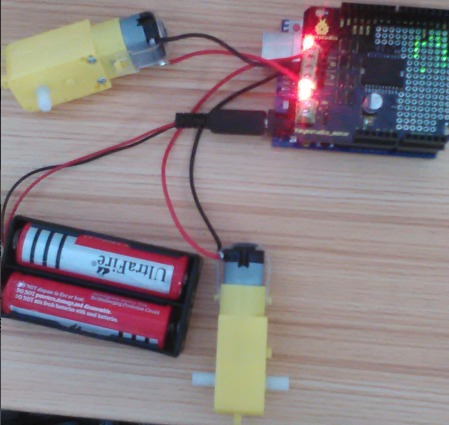
Después de encenderlo, el indicador de alimentación se encenderá; Dos motores comienzan a girar en
sentido horario; el pin13 LED en la placa principal estará encendido y los dos LEDs rojos en el
escudo será demasiado. Después de giro horario para 8S, los dos LED rojo se apagará y los 2 azules
estará en; la CCW rotación de dos motores para 8S y, a continuación, repita el ciclo.
Shield o escudo multi-proposito V1 con varios sensores para arduino. Marca Keyestudio.
Escudo de teclas táctiles con conexión USB. Marca Keyestudio.
Controlador de velocidad L298P PWM o Controlador dual de puente H de alta potencia con interfaz para Bluetooth
Shield o escudo del sensor Xbee V5 con interfaz RS485 BLUEBEE. Marca Keyestudio.
Tarjeta de expansión para arduino Nano 328P con zócalos para sensores IO, zócalo para conexión inalámbrica XBEE y NRF24L01
Escudo con protoboard de montaje para tarjeta UNO R3. Marca Keyestudio.
Escudo controlador de 16 servomotores para ARDUINO. Marca Keyestudio.
")
Escudo de 2 Amperios con controlador de motor DC (puente H) para ARDUINO. Marca Keyestudio.
























